Description
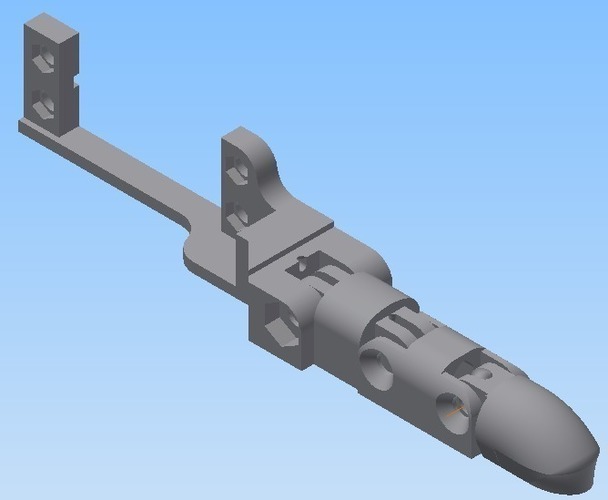
SummaryA finger that uses a "standard" (0.8" x 1.6" gearbox) servo. The finger tip clips onto the final joint. 3x 10-32 flat head bolts~.875" long with hex nuts are needed for the joints. Use fishing line or similar wire for tendons.
I did this as an experiment. Expect more hand/finger/arm related things showing up soon. I made this last summer and realized I still had it.
More from this category
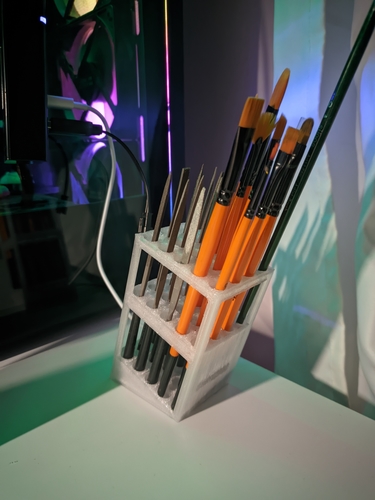
paint brush box
by IlyasK. MA
Kalem ve boya fırçalarını koyabileceğiniz bir stand.
0 ❤️
0 💬
0 ⬇️
$1.0


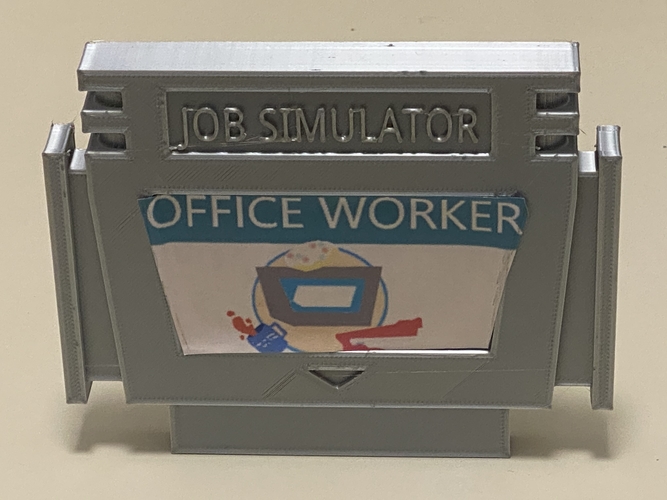
Job Simulator Blank cartridge
A fun gaming prop for fans of one of the best VR games Job Simulator. Happy jobbing.
1 ❤️
7 💬
0 ⬇️
Free
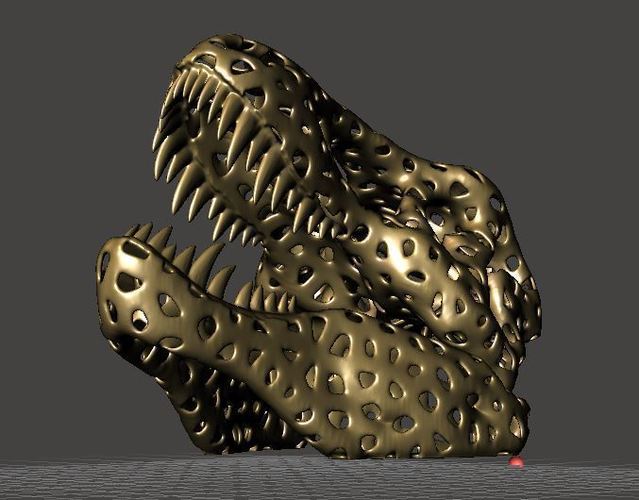
Voronified T-Rex
SummaryNicely voronified skull. Has its own support. I put the file without support too Makerware...
3 ❤️
1 💬
0 ⬇️
Free

Comments (1)
Sign in to leave a comment.
No comments yet. Be the first to comment!