

Description
Summary
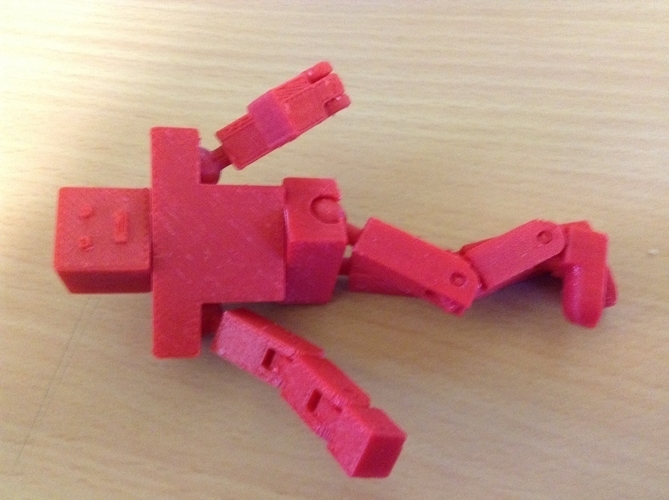
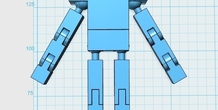
This robot has moving joints and is designed to be printed in one go. He has ankle, knee, hip, waist, wrist, elbow, shoulder and neck joints that all move.
Instructions
Currently the hip joints are slightly too loose, and the shoulder joints are a bit stiff, I am still working on perfecting the tolerances in the gaps.
More from this category
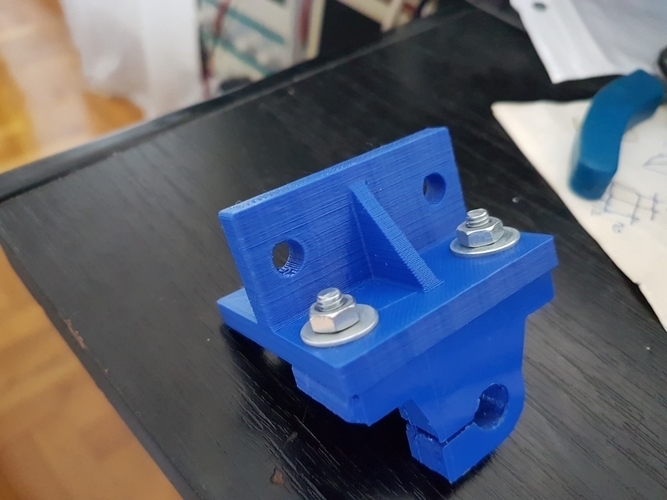
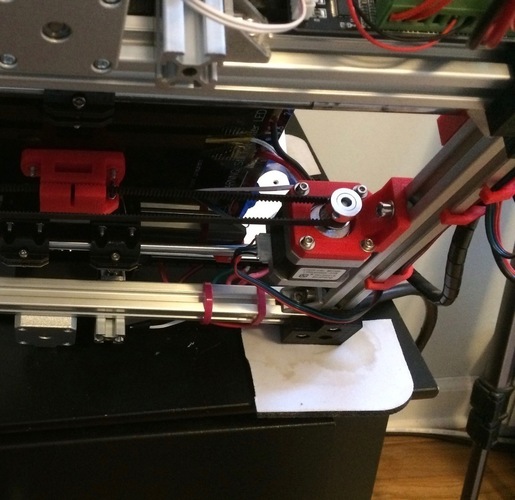
Improved Y Motor mount for Prusa i3 Clone (Max Micron and others
by thomllama
Summary note June 19th 2016 slight adjustments to fit better with the stepper motor up loaded and...
0 ❤️
1 💬
0 ⬇️
Free

RetroPie Arcade Cabinet
by nbrewer
Summary This retro-futuristic arcade cabinet is made of high quality birch and designed for two p...
0 ❤️
1 💬
0 ⬇️
Free
Kossel Fan shroud for the fisheye effector
by oXiVanisher
Summary This fan shroud is for object cooling.
0 ❤️
1 💬
0 ⬇️
Free


Pen display
by bret
Summary A friend has started turning pens and needed a way to display them. So this was born Prin...
2 ❤️
1 💬
0 ⬇️
Free
Comments (1)
Sign in to leave a comment.
No comments yet. Be the first to comment!