






SummaryGithub Repository
bqlabs/miniloki
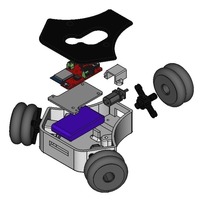
Hardware
Hardware
Description
bqlabs/OmniBoard
ESP12 WiFi board with 3 motor driver and 2s lipo charger
Turnigy nano-tech 460mah 2S 25~40C Lipo Pack
460mah 2S 25~40C Lipo Pack
3 x Pololu Micro Metal Gearmotors
Brushed DC gearmotors available in a wide range of gear ratios—from 5:1 up to 1000:1—and with four different motors: high-power with long-life carbon brushes (HPCB), high-power with shorter-life precious metal brushes (HP), medium-power (MP), and low-power.
3x Pololu Micro Metal Gearmotor Bracket Extended
Pololu Micro Metal Gearmotor Bracket Extended Pair
3x 48mm Omniwheel for LEGO NXT, Servo
Omniwheel for NXT compatible hub or Axle Centre and servo motor
Software
We use platformio to upload the code to the board.
~/miniloki$ cd code/platformio/miniloki_omniboard
~/miniloki/code/platformio/miniloki_omniboard$ platformio run
We use Python to control miniloki with a joystick
~/miniloki$ cd code/python/
~/miniloki/code/python$ python client.pyPrint SettingsPrinter: Witbox 2Rafts: Doesn't MatterPost-Printing
Loading prints...
Mini Loki - Omnidirectional robotic platform
8
likes
6
collections
Tags:
Creative Commons Attribution-ShareAlike
You can distribute, remix, adapt, and build upon the material in any medium or format, as long as attribution is given and your contributions are under the same license.
 Licensed under CC BY-SA
Licensed under CC BY-SA




Loading comments...