









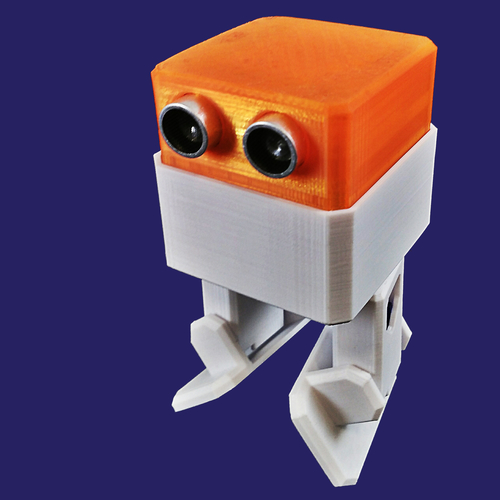
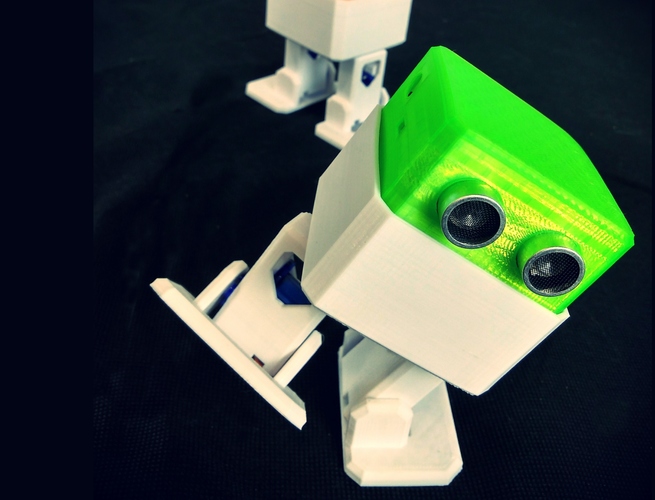
Tito
walking and dancer DIY biped robot is a derivative design of Zowi which is based on BOB the original biped robot that uses only 4 servos to walk and move. Made the following improvements:
- able to have an Arduino UNO board (or smaller) inside the robot head.
- 3 LEDs for a simple mouth.
- Rounded top head.
- Legs thickness increased and reinforced rounds.
- Rounded feet top.
- Chassis - base simplified.
- Easy to reprogram or energize having the connectors in the back.
- Arduino UNO or compatible, i use a DFRduino R3
- Nano breadboard or weld all cables
- Buzzer
- Futaba servo S3003 x4
- HC-SR04 Ultrasound sensor
- Nuts M3 x20
- Screws M3x12 x20
- Powerbank (optional) or just use the usb for power the Arduino board.
- Check the schematic picture for connection
- The HC-SR04 Ultrasound sensor is not connected in the schematic; trig for pin 8 and echo for pin 9)
Using same original code for Arduino as Otto DIY https://github.com/OttoDIY/DIY
Loading prints...
Tito biped robot
8
likes
3
collections
Tags:
Creative Commons Attribution-ShareAlike
You can distribute, remix, adapt, and build upon the material in any medium or format, as long as attribution is given and your contributions are under the same license.
 Licensed under CC BY-SA
Licensed under CC BY-SA


Loading comments...