




Summary
Updates -
Uploaded the Rotating Base http://www.thingiverse.com/thing:2186716
3/10/17- Youtube Video! https://www.youtube.com/watch?v=RcUrgxrOqVo&feature=youtu.be
2/12/12 - added holes in top half of joint to access screws easily.
2/13/17 - added flat spot to top half of joint for better bed adhesion
3/4/16- Designed a EZ Print Version http://www.thingiverse.com/thing:2153317
This gearbox and joint setup has very little backlash, maybe 1 degree when the gears are printed correctly. Running the gearbox without it pressed into the arm is a good way to wear it in so it doesn't rob torque from your stepper.
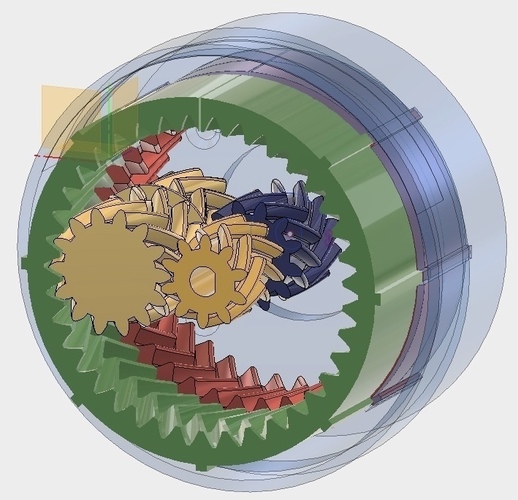
The Gearbox (43.33 :1) for use with this joint is a different "thing", heres a link:
http://www.thingiverse.com/thing:2101218
FYI... The gearbox also acts as a bearing for the joint.
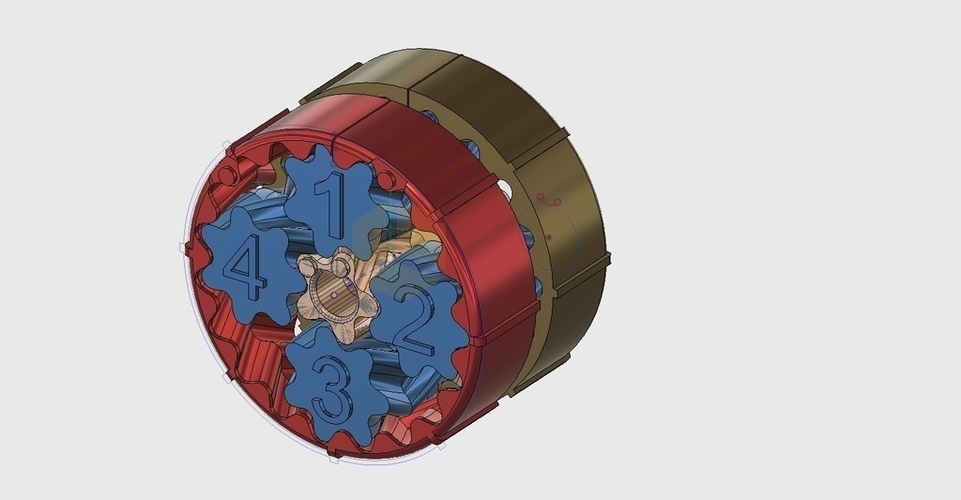
I designed the gearbox with an optional 4th ring and longer planet gears to accommodate that, if you would like to use that setup you will also need to print out the Optional Side Bearing.STL file. The Side Bearing holder is pressed in place and secured with 1.75 filament though the hole. This setup should give the joint more support against side to side play and should also reduce backlash.
There is also a mount to attach a second NEMA 17 motor, so you can drive the gearbox from both ends, it is attached with a press fit and held in place with 1.75 filament pressed through the holes. This setup also significantly reduces backlash and side to side play as the gearbox actually uses the stepper motor shaft as a support, thus supporting the joint.
This is the first release of this project, next i will be working on a base and a rotation joint for this design. all of the parts will be stackable, so this joint can be endlessly stacked on itself, and joined by pressing 1.75 filament into the holes.
This arm rotates 230 degrees before colliding with itself in the CAD program, it's probably more like 220 degrees real life.
Feel Free to Create your own joints and attachment for this project ;)
Oh yeah, If you print this and get it working, would you kindly post a make with a picture or video? Please and thank you!
Print Settings
Printer Brand:
Prusa Rafts:
No Supports:
Yes Resolution:
.25 Infill:
10 - 50% Notes:
I printed this on my Anet A8
You need to print these parts so the rings are flat on the build plate, it is so much stronger that way, i attempted printing it upright and the ring cracked while inserting the gears.
i had trouble with the rings getting messy until i set support top distance to 0
Loading prints...
Modular Robotic Arm, Hinge Joint, No Hardware
3
likes
1
collection
Tags:
Creative Commons Attribution
You can distribute, remix, adapt, and build upon the material in any medium or format, as long as attribution is given to the creator.
 Licensed under CC BY
Licensed under CC BY


Loading comments...