
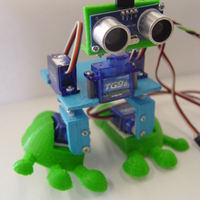

After seeing a couple really cool examples of "four degrees of freedom" biped out there, I decided that I would make some cool feet and make the robots a bit more creature-like. Current ideas for cool feet are beasty feet, mech-like feet, rock feet.. you know.
The preceding examples of this type of robot used the pcb as the mounting point for the servos, and I've made a generic baseplate with room for a mini breadboard or your own preferred platform. I've also added a "neck" servo for looking around and ultrasonic sensor for sight. I plan to make a housing and more creature feet for this as there is much potential for customization.
The code I'm using is a derivation of the functions and primitives written for uBipedino (tm) by user Ro-Bot-X on the Let's Make Robots site. It is the part of the robot that is in progress, as I am working to fine tune the ultrasonics.
The link to Ro-bot-X's wonderful creation is here: http://letsmakerobots.com/node/30394
Arduped's home is at: www.handmadecircuits.com
Here is a video with some tips and tricks for assembly:
https://vimeo.com/42201765
...and here is a video showing Aduped's first steps!
https://vimeo.com/38867140
Loading prints...
Arduped Biped Robot
12
likes
5
collections
Tags:
Creative Commons Attribution-NonCommercial-ShareAlike
You can distribute, remix, adapt, and build upon the material in any medium or format for noncommercial purposes only, with attribution and under the same license.
 Licensed under CC BY-NC-SA
Licensed under CC BY-NC-SA

Loading comments...